-
 Основные типы цепей, обеспечивающих цифровые (единичные или нулевые) входы контроллера. Простейший вариант — простой переключатель между выводом и шиной О В. Нормальное состояние входа — высокий уровень напряжения, который изменяется на низкий по нажатию к...Просмотров: 279103-11-2013, 19:35
Основные типы цепей, обеспечивающих цифровые (единичные или нулевые) входы контроллера. Простейший вариант — простой переключатель между выводом и шиной О В. Нормальное состояние входа — высокий уровень напряжения, который изменяется на низкий по нажатию к...Просмотров: 279103-11-2013, 19:35 -
 Хотя двигатели — электрические устройства и, следовательно, посвященной электронике, они приводят в движение механические детали, поэтому мы поговорим о них здесь. В центре нашего внимания будут небольшие низковольтные двигатели постоянного тока. При выборе дв...Просмотров: 165902-11-2013, 19:32
Хотя двигатели — электрические устройства и, следовательно, посвященной электронике, они приводят в движение механические детали, поэтому мы поговорим о них здесь. В центре нашего внимания будут небольшие низковольтные двигатели постоянного тока. При выборе дв...Просмотров: 165902-11-2013, 19:32 -
 Основные параметры несущих колес — диаметр и протектор. Большой диаметр предпочтителен в случае грубой или неровной поверхности, поскольку колесу проще преодолевать бугры и менее вероятно, что оно застрянет в яме. Кроме того, большее колесо обеспечивает хороший ...Просмотров: 2576
Основные параметры несущих колес — диаметр и протектор. Большой диаметр предпочтителен в случае грубой или неровной поверхности, поскольку колесу проще преодолевать бугры и менее вероятно, что оно застрянет в яме. Кроме того, большее колесо обеспечивает хороший ...Просмотров: 2576 -
 Инструменты, которые необходимы при сборке роботов, частично определяются используемыми материалами. Так, для работы с пенополистиролом основные инструменты — стальная линейка, ремесленный нож и пластмассовая разделочная доска (используйте ту, которая отслужила ...Просмотров: 3336
Инструменты, которые необходимы при сборке роботов, частично определяются используемыми материалами. Так, для работы с пенополистиролом основные инструменты — стальная линейка, ремесленный нож и пластмассовая разделочная доска (используйте ту, которая отслужила ...Просмотров: 3336 -
 В большинстве случаев компоненты робота скрепляют с помощью болтов и гаек. В общем случае наиболее применимы болты с диаметром сечения 3 мм (МЗ), однако иногда требуются и размеры поменьше. Так, например, монтажные отверстия двигателя могут соответствовать болтам М2,5...Просмотров: 1875
В большинстве случаев компоненты робота скрепляют с помощью болтов и гаек. В общем случае наиболее применимы болты с диаметром сечения 3 мм (МЗ), однако иногда требуются и размеры поменьше. Так, например, монтажные отверстия двигателя могут соответствовать болтам М2,5...Просмотров: 1875 -
 Материалы для корпуса или рамы робота должны быть достаточно прочными, простыми в обработке, надежными и дешевыми. Кроме того, они должны хорошо выглядеть, т.е. иметь блестящую или привлекательно окрашенную поверхность.Всеми этими качествами обладают некоторые виды пл...Просмотров: 326301-11-2013, 21:07
Материалы для корпуса или рамы робота должны быть достаточно прочными, простыми в обработке, надежными и дешевыми. Кроме того, они должны хорошо выглядеть, т.е. иметь блестящую или привлекательно окрашенную поверхность.Всеми этими качествами обладают некоторые виды пл...Просмотров: 326301-11-2013, 21:07 -
 Микроконтроллер работает по программе, которая хранится в цифровой форме в оперативной памяти в виде кода, называемого машинным. Этот код очень трудно писать вручную, но, к счастью, на помощь приходит компьютер. С помощью специального программного обеспечения программ...Просмотров: 1652
Микроконтроллер работает по программе, которая хранится в цифровой форме в оперативной памяти в виде кода, называемого машинным. Этот код очень трудно писать вручную, но, к счастью, на помощь приходит компьютер. С помощью специального программного обеспечения программ...Просмотров: 1652 -
 Перед началом сборки робота следует обдумать ряд аспектов. • какая-нибудь заготовка (например в виде пластмассовой коробки для завтраков) — такой робот просто и быстро собирается;• готовая игрушка — обычно все идет быстро и гладко, однако иногда возникают ...Просмотров: 3255
Перед началом сборки робота следует обдумать ряд аспектов. • какая-нибудь заготовка (например в виде пластмассовой коробки для завтраков) — такой робот просто и быстро собирается;• готовая игрушка — обычно все идет быстро и гладко, однако иногда возникают ...Просмотров: 3255 -
 Портальные роботы работают в четко определенной прямоугольной области. Они берут объекты в любой точке данной области и опускают ч их в другой точке этой же области. Рабочий инструмент такого робота (обычно — схват) подвешен на небольшой раме-вагонетке, и может ...Просмотров: 2737
Портальные роботы работают в четко определенной прямоугольной области. Они берут объекты в любой точке данной области и опускают ч их в другой точке этой же области. Рабочий инструмент такого робота (обычно — схват) подвешен на небольшой раме-вагонетке, и может ...Просмотров: 2737 -
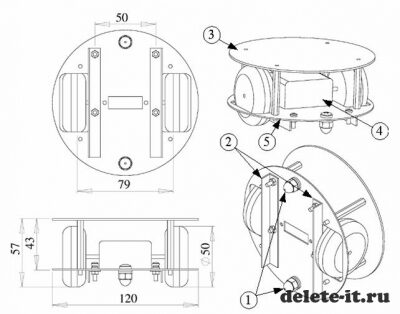 По определению, все мобильные роботы должны быть способны передвигаться в прямом и обратном направлениях, а также — поворачиваться влево и вправо. Роботы зачастую работают в ограниченном пространстве, поэтому для них также было бы желательно уметь поворачиваться...Просмотров: 2564
По определению, все мобильные роботы должны быть способны передвигаться в прямом и обратном направлениях, а также — поворачиваться влево и вправо. Роботы зачастую работают в ограниченном пространстве, поэтому для них также было бы желательно уметь поворачиваться...Просмотров: 2564